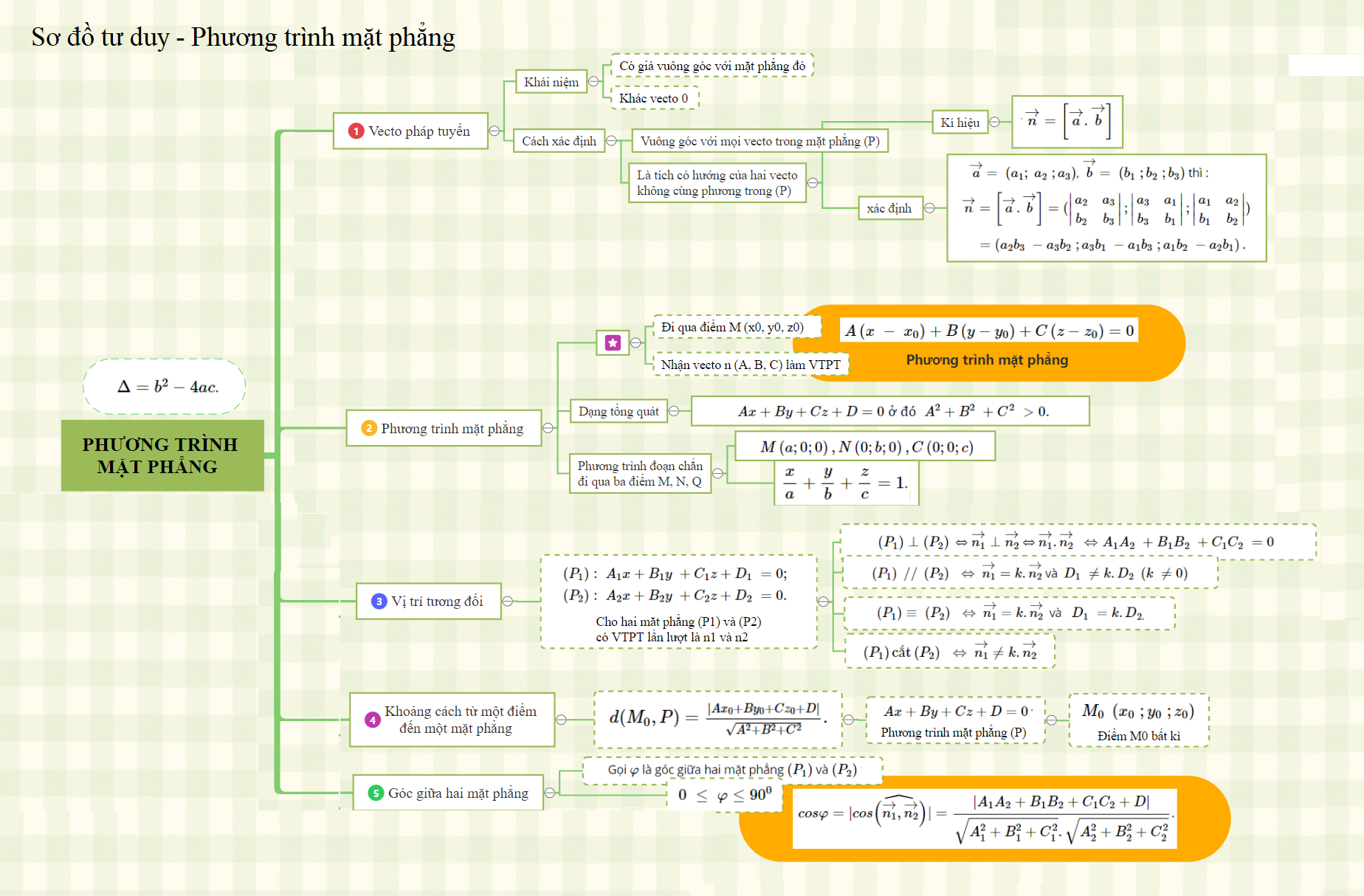
1. Vectơ pháp tuyến của mặt phẳng.
* Cho mặt phẳng \ ( ( P ) \ ), vectơ \ ( \ overrightarrow { n } \ neq \ overrightarrow { 0 } \ ) mà giá của nó vuông góc với mặt phẳng \ ( ( P ) \ ) thì \ ( \ overrightarrow { n } \ ) được gọi là vectơ pháp tuyến của mặt phẳng \ ( ( P ) \ ) .* Cho mặt phẳng \ ( ( P ) \ ), cặp vectơ \ ( \ overrightarrow { a } \ neq \ overrightarrow { 0 } \ ), \ ( \ overrightarrow { b } \ neq \ overrightarrow { 0 } \ ) không cùng phương mà giá của chúng là hai đường thẳng song song hay nằm trong mặt phẳng \ ( ( P ) \ ) được gọi là cặp vectơ chỉ phương của mặt phẳng \ ( ( P ) \ ). Khi đó vectơ \ ( \ overrightarrow { n } = \ left [ \ overrightarrow { a }. \ overrightarrow { b } \ right ] \ ). là vectơ pháp tuyến của mặt phẳng \ ( ( P ) \ ) .
* Nếu \(\overrightarrow{a}\) \( = \;\left( {{a_1};{\rm{ }}\;{a_{2\;}};{\rm{ }}{a_3}} \right)\), \(\overrightarrow{b}\) \( = \;\left( {{b_1}\;;{\rm{ }}{b_2}\;;{\rm{ }}{b_3}} \right)\) thì :
\ ( \ overrightarrow { n } = \ left [ \ overrightarrow { a }. \ overrightarrow { b } \ right ] = ( \ begin { vmatrix } a_ { 2 } và a_ { 3 } \ \ b_ { 2 } và b_ { 3 } \ end { vmatrix } ; \ begin { vmatrix } a_ { 3 } và a_ { 1 } \ \ b_ { 3 } và b_ { 1 } \ end { vmatrix } ; \ begin { vmatrix } a_ { 1 } và a_ { 2 } \ \ b_ { 1 } và b_ { 2 } \ end { vmatrix } ) \ )\ ( = \ left ( { { a_2 } { b_3 } \ ; – { \ rm { } } { a_3 } { b_ { 2 \ ; } } ; { \ rm { } } { a_3 } { b_1 } \ ; – { \ rm { } } { a_1 } { b_3 } \ ; ; { \ rm { } } { a_1 } { b_2 } \ ; – { \ rm { } } { a_2 } { b_1 } } \ right ). \ )* Mặt phẳng trọn vẹn được xác lập khi biết một điểm và một vectơ pháp tuyến của nó, hay một điểm thuộc mặt phẳng và cặp vectơ chỉ phương của nó .
2. Phương trình mặt phẳng.
* Mặt phẳng \ ( ( P ) \ ) qua điểm \ ( { M_ { 0 \ ; } } \ left ( { { x_0 } \ ; ; { \ rm { } } { y_ { 0 \ ; } } ; { \ rm { } } { z_0 } } \ right ) { \ rm { } } \ ; \ ) và nhận \ ( \ overrightarrow { n } \ ) \ ( \ left ( { A, { \ rm { } } B, { \ rm { } } C } \ right ) \ ) làm vectơ pháp tuyến có phương trình có dạng : \ ( A \ left ( { x \ ; – \ ; { x_0 } } \ right ) + B \ left ( { y – { y_0 } } \ right ) + C \ left ( { z – { z_0 } } \ right ) = 0 \ )
* Mọi mặt phẳng trong khoảng trống có phương trình tổng quát có dạng :\ ( \ ; { \ rm { } } \ ; { \ rm { } } \ ; { \ rm { } } \ ; { \ rm { } } \ ; { \ rm { } } \ ; { \ rm { } } \ ; Ax { \ rm { } } + { \ rm { } } By + Cz + D = 0 { \ rm { } } \ ; { \ rm { } } \ text { ở đó } \ ; { A ^ 2 } + { \ rm { } } { B ^ 2 } \ ; + { C ^ { 2 \ ; } } > 0. \ ) Khi đó vectơ \ ( \ vec n \, ( A ; B ; C ) \ ) là vectơ pháp tuyến của mặt phẳng .* Mặt phẳng đi qua ba điểm \ ( M \ left ( { a ; 0 ; 0 } \ right ), { \ rm { } } N \ left ( { 0 ; b ; 0 } \ right ), { \ rm { } } C \ left ( { 0 ; 0 ; c } \ right ) \ ) ở đó \ ( abc \ ; \ ne 0 \ ) có phương trình : \ ( \ dfrac { x } { a } + \ dfrac { y } { b } + \ dfrac { z } { c } = 1 \ ). Phương trình này còn được gọi là phương trình mặt phẳng theo đoạn chắn .
3. Vị trí tương đối của hai mặt phẳng.
Cho hai mặt phẳng \ ( \ left ( { { P_1 } } \ right ) \ ) và \ ( \ left ( { { P_2 } } \ right ) \ ) có phương trình :
\(\begin{array}{*{20}{l}}
{\left( {{P_1}} \right):\;{A_1}x + {B_1}y\; + {C_1}z + {D_1}\; = 0;}\\
{\left( {{P_2}} \right):\;{A_2}x + {B_2}y\; + {C_2}z + {D_2}\; = 0.}
\end{array}\)
Ta có \(\overrightarrow {{n_1}} \;(A1;B1;C1) \bot (P1)\) và \(\overrightarrow {{n_2}} \;(A2;B2;C2) \bot (P2)\). Khi đó:
\ ( ( { P_1 } ) \ ; \ bot \ ; ( { P_2 } ) \ ) ⇔ \ ( \ overrightarrow { n_ { 1 } } \ perp \ overrightarrow { n_ { 2 } } \ ) ⇔ \ ( \ overrightarrow { n_ { 1 } }. \ overrightarrow { n_ { 2 } } \ ) \ ( \ ; \ Leftrightarrow { \ rm { } } { A_1 } { A_2 } \ ; + { \ rm { } } { B_1 } { B_2 } \ ; + { \ rm { } } { C_1 } { C_2 } \ ; = { \ rm { } } 0 \ )\ ( \ left ( { { P_1 } } \ right ) \ ; / / \ ; \ left ( { { P_2 } } \ right ) \ ; \ ; \ Leftrightarrow \ ; \ ) \ ( \ overrightarrow { n_ { 1 } } = k. \ overrightarrow { n_ { 2 } } \ ) và \ ( { D_1 } \ ; \ ne { \ rm { } } k. { D_2 } \ ; \ left ( { k \ ; \ ne { \ rm { } } 0 } \ right ). \ )\ ( \ left ( { { P_1 } } \ right ) \ equiv \ ; \ left ( { { P_2 } } \ right ) \ ; \ ; \ Leftrightarrow \ ; \ ) \ ( \ overrightarrow { n_ { 1 } } = k. \ overrightarrow { n_ { 2 } } \ ) và \ ( \ ; { D_1 } \ ; = { \ rm { } } k. { D_ { 2. } } \ )\ ( \ left ( { { P_1 } } \ right ) \ text { cắt } \ left ( { { P_2 } } \ right ) \ ; \ ; \ Leftrightarrow \ ; \ ) \ ( \ overrightarrow { n_ { 1 } } \ neq k. \ overrightarrow { n_ { 2 } } \ ) ( nghĩa là \ ( \ overrightarrow { n_ { 1 } } \ ) và \ ( \ overrightarrow { n_ { 2 } } \ ) không cùng phương ) .
4. Khoảng cách từ một điểm đến một mặt phẳng.
Trong khoảng trống \ ( Oxyz \ ) cho mặt phẳng \ ( ( P ) \ ) có phương trình :\ ( Ax + By + Cz + D = 0 \ ) và điểm \ ( { M_ { 0 \ ; } } \ left ( { { x_0 } \ ; ; { \ rm { } } { y_ { 0 \ ; } } ; { \ rm { } } { z_0 } } \ right ). \ ). Khoảng cách từ M0 đến \ ( ( P ) \ ) được cho bởi công thức :\ ( d ( { M_0 }, P ) = \ frac { { | A { x_0 } + B { y_0 } + C { z_0 } + D | } } { { \ sqrt { { A ^ 2 } + { B ^ 2 } + { C ^ 2 } } } }. \ )
5. Góc giữa hai mặt phẳng.
Cho hai mặt phẳng \ ( \ left ( { { P_1 } } \ right ) \ ) và \ ( \ left ( { { P_2 } } \ right ) \ ) có phương trình :
\(\begin{array}{*{20}{l}}
{\left( {{P_1}} \right):\;{A_1}x + {B_1}y\; + {C_1}z + {D_1}\; = 0;}\\
{\left( {{P_2}} \right):\;{A_2}x + {B_2}y\; + {C_2}z + {D_2}\; = 0.}
\end{array}\)
Gọi \(\varphi \) là góc giữa hai mặt phẳng \(\left( {{P_1}} \right)\) và \(\left( {{P_2}} \right)\) thì \(0\; \le \;\varphi {\rm{ }} \le {\rm{ }}{90^{0\;}}\) và :
\ ( cos \ varphi = | cos \ widehat { \ left ( \ overrightarrow { n_ { 1 } }, \ overrightarrow { n_ { 2 } } \ right ) } | = \ dfrac { | A_ { 1 } A_ { 2 } + B_ { 1 } B_ { 2 } + C_ { 1 } C_ { 2 } + D | } { \ sqrt { A_ { 1 } ^ { 2 } + B_ { 1 } ^ { 2 } + C_ { 1 } ^ { 2 } }. \ sqrt { A_ { 2 } ^ { 2 } + B_ { 2 } ^ { 2 } + C_ { 2 } ^ { 2 } } } \ ) .
Loigiaihay.com
Source: https://futurelink.edu.vn
Category: Tin tổng hợp